News Story
Clark School team wins AFRL funding for swarm autonomy planning and metareasoning

Professor Jeffrey Herrmann (ME/ISR) is the principal investigator for a new award from the Air Force Research Laboratory (AFRL), "Planning and Metareasoning for Multi-Agent Systems with Variable Communication Availability." Co-PIs on the project are Professor Shapour Azarm (ME), Assistant Professor Michael Otte (AE), and Assistant Professor Huan (Mumu) Xu (AE/ISR).
The research is part of AFRL’s Autonomous Swarms for Information-aware Mission Operations with Verification (ASIMOV) program, which studies algorithms for swarm autonomy in communications-constrained operating environments. The ASIMOV program is directed by Dr. Jeff Hudack at AFRL.
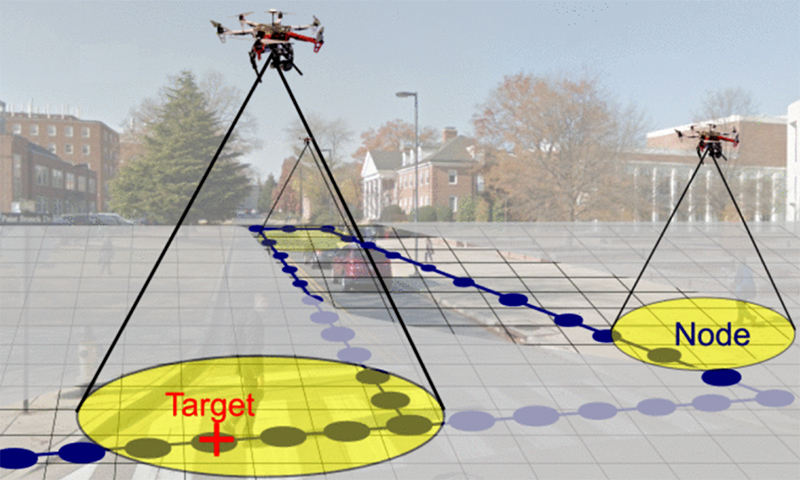
Coordinating the actions of different agents (such as unmanned aerial vehicles) to perform complex tasks like collaborative search and tracking, are essential to an autonomous swarm. The relative performance of coordination techniques may change as the availability of communication such as bandwidth and reliability varies.
The Clark School researchers will develop hybrid centralized and decentralized multi-agent task allocation methods with different levels of communication availability. They also will build metareasoning techniques to enable autonomous agents to select the most appropriate task allocation method in real-time based on the current state of communication availability and other relevant factors. The team will evaluate the methods in situations that include a swarm of autonomous vehicles fighting a wildfire.
The 18-month project, with an additional six-month option, is funded at $900,000.
Published December 11, 2018
Related Stories
Stories / January 5, 2023
ArtIAMAS receives third-year funding of up to $15.1M
Stories / October 16, 2023
CSRankings places Maryland robotics at #10 in the U.S.

Stories / September 27, 2023
Department Welcomes New Faculty Member John Martin

Stories / August 17, 2023
Short Course Offers Opportunity to Build and Fly Drones

Stories / April 28, 2023
New short course focuses on drones

Stories / February 24, 2023
UMD’s SeaDroneSim can generate simulated images and videos to...
Stories / May 26, 2021
UMD, UMBC, ARL Announce Cooperative Agreement to Accelerate AI,...

Stories / March 3, 2020
A cooperative control algorithm for robotic search and rescue
Stories / May 16, 2019
Helping robots remember
Stories / March 25, 2019
Do Good Robotics Symposium to explore technologies that benefit...