News Story
New 4-rotor Cyclocopter video
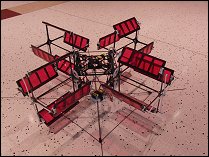
This new video from the Alfred Gessow Rotorcraft Center shows stable hover of a novel Vertical Take-Off and Landing (VTOL) aircraft -- the Cyclocopter, developed at the University of Maryland by Dr. Moble Benedict, Mr. Joseph Mullins, Dr. Vikram Hrishikeshavan and Prof. Inderjit Chopra.
Cyclocopter utilizes cycloidal-rotors (cyclorotors), a revolutionary horizontal axis propulsion concept which has many advantages such as higher aerodynamic efficiency and maneuverability. One of the key advantages of the cyclorotor is its thrust vectoring capability, which is utilized in the present study for yaw control. The present vehicle has a quad-cyclorotor configuration where each of the rotors is powered using independent motors. Also by using separate thrust vectoring mechanisms for each rotor, each of the thrust vectors could be independently tilted making the vehicle extremely maneuverable.
The cyclorotor design was optimized based on the detailed experimental studies conducted by Dr. Moble Benedict, Mr. Tejaswi Jarugumilli and Prof. Inderjit Chopra. A novel attitude control technique is developed using differential RPM control and thrust vectoring which is also designed to take care of the inherent pitch-roll couplings. For closed-loop attitude stabilization of the vehicle, a proportional-derivative controller was implemented on an onboard 3 gram processor-sensor board. Using this control system, the stable autonomous hover of the cyclocopter was successfully demonstrated. This is the first pure cyclocopter (entire thrust produced from cyclorotors) in the history to perform stable controlled hover after the inception of this concept 100 years back.
Published December 20, 2012
Recent Stories
Stories / Jul 1, 2026
Establish Research Partnerships at the MATRIX Open House

Stories / Jun 25, 2026
Aircraft May Refuel Themselves - With Help From AI

Stories / Jun 24, 2026
Dean Graham Reappointed to Second Five-Year Term

Stories / Jun 17, 2026
Historic CURN Drone Flight Crosses Chesapeake Bay

Stories / Jun 10, 2026
UMD Students Set Sights on Smoother Lunar Landings

Stories / Jun 9, 2026
The Future of Terps Racing is Electric

Stories / Jun 2, 2026
Wielgosz Receives ARCS MWC Foundation Scholarship

Stories / May 22, 2026
Costello: Advancing Aerial Autonomy

Stories / May 19, 2026
Student Success at SAMPE 2026

Stories / May 13, 2026
Team IM-SPARX Wins at Capstone Design Expo
